Laser pour cartographier des objets en dehors de la ligne de visée
Vous ne pouvez pas voir le lapin, mais le laser peut certainement. Dans un laboratoire de l'université de Stanford, des ingénieurs ont installé un dispositif étrange qui cache un lapin en peluche derrière un mur en forme de T. Leurs systèmes informatiques sophistiqués et les laser rouge à émission rapide peuvent être vus dans ce coin.
Eh bien, l'avenir des voitures autonomes aussi. C'est au moins l'idée derrière cette technique, qui utilise la trajectoire du photon dans le laser pour calculer la forme et la position des objets cachés - que ce soit un lapin ou un passant.
Ce n'est pas une idée complètement nouvelle. Le système déploie le même timing très précis pour piloter les lidars à jet laser sur les voitures autonomes. Lidar construit une carte tridimensionnelle de l'environnement en calculant le temps qu'il faut à tous ces photons pour rebondir de l'objet à l'appareil, aidant la voiture à trouver la direction. C'est le cas, mais c'est plus difficile.
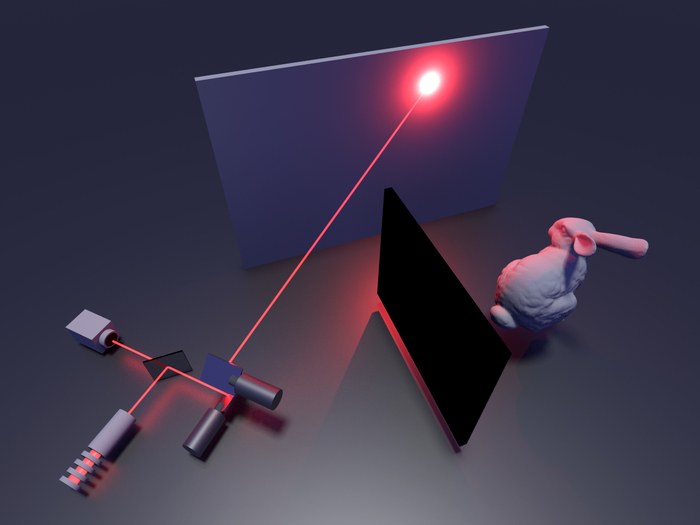
Si vous êtes dans un moment difficile pour imaginer comment les lasers peuvent "voir" les murs, permettez-moi de clarifier. Dessinez deux murs qui se croisent en forme de T. Tire-les un peu maintenant. Placez un lapin jouet derrière la «jambe» de T. Si vous vous tenez de l'autre côté de la jambe (maintenant vous ne pouvez pas voir le lapin), vous pouvez toujours tuer le petit coquin en lançant une balle sur un autre mur. Il va s'écarter du mur à un certain angle et passera à travers l'espace que vous venez de faire et le fera disparaître.
Maintenant, remplacez la balle avec un laser vert qui émet des millions d'impulsions de lumière par seconde. La lumière est réfléchie par le mur à un angle, frappe le lapin derrière l'écran, rebondit vers le mur, puis revient vers vous - laissant une traînée de lumière laser, l'algorithme peut se transformer en une image tridimensionnelle du lapin.
Cependant, certains des défis sont: Une fois que le laser rebondit du mur au lapin au capteur sur le mur, les chercheurs laisseront une lumière extrêmement faible. C'est pourquoi ils ont besoin d'une soi-disant diode à avalanche à photon unique (SPAD) pour tirer pleinement parti de ce signal minuscule. "Pensez aux maisons de cartes", a déclaré Gordon Wetzstein, ingénieur électricien à l'Université de Stanford. "Vous ne pouvez pas détecter vous-même un photon, c'est très petit. Mais une fois que le photon frappe un SPAD particulier, comme si vous tiriez une carte au bas de la maison, tout s'écroulerait.
David Lindell, ingénieur électricien à l'université de Stanford, a expliqué qu'un seul photon peut déclencher un courant d'avalanche dans le capteur. C'est cette pointe de tension qui permet aux ingénieurs de savoir quand le photon revient. Dans cette démo, l'équipe a allumé leur laser pendant 7 ou 70 minutes, selon la façon dont l'objet se reflétait, pendant que le SPAD surveillait le retour du laser.
Cela explique comment ils collectent leurs données - mais pas comment ils les transforment en une visualisation 3D des objets cachés. Pour comprendre la situation derrière ce mur, les chercheurs doivent comprendre tous les chemins potentiels du laser rasant. Donc, ils doivent également analyser la géométrie du mur. "Avec la compréhension de l'emplacement du mur, vous pouvez faire cette reconstruction pour obtenir la géométrie 3D de l'objet caché", a déclaré Lindel. Une fois que les données sont entrées dans le balayage mural et que le SPAD revient 7 ou 70 minutes, l'algorithme peut commencer à éliminer le bruit, tel que la lumière ambiante dans la pièce.
Afin de collecter toutes les données, le système précédent utilisait du matériel très puissant et beaucoup de temps. Cependant, avec cette nouvelle configuration, il a été publié lundi dans le magazine Nature, et les ingénieurs peuvent le configurer presque instantanément sur les ordinateurs portables. "Vous pouvez appuyer sur un bouton sur un ordinateur portable et traiter les images en une seconde", a déclaré Lindell. "Cela a pris des heures pour le faire sur du matériel de calcul intensif."
Ceci est dû en partie à la façon dont le système est configuré. Dans les méthodes précédentes d'utilisation des lasers pour visualiser les coins, les détecteurs de laser et de lumière n'étaient pas pointés au même endroit, rendant ainsi le système "non-confocal". "L'utilisation de la méthode confocale est une nouvelle idée inattendue et simplifie l'algorithme pour voir les coins", a déclaré Achuta Kadambi du Massachusetts Institute of Technology, où il travaille sur l'imagerie computationnelle.
Puisque presque toutes les personnes qui travaillent dans des véhicules autonomes ont déjà dépendu de lasers, il est raisonnable de supposer qu'ils peuvent utiliser une technologie de voyeur de coin dans le futur. Malgré cela, le défi demeure: les chercheurs doivent augmenter la capacité du laser à travailler à la lumière du jour sans brûler les yeux des piétons. Dans le monde réel, les photons rebondiront à partir de diverses surfaces plus irrégulière.
Puisque presque toutes les personnes qui travaillent dans des véhicules autonomes ont déjà dépendu de lasers, il est raisonnable de supposer qu'ils peuvent utiliser une technologie de voyeur de coin dans le futur. Malgré cela, le défi demeure: les chercheurs doivent augmenter la capacité du laser à travailler à la lumière du jour sans brûler les yeux des piétons. Dans le monde réel, les photons rebondiront à partir de diverses surfaces plus irrégulièrement que les murs du laboratoire. En outre, vous ne pouvez pas attendre quelques minutes pour voir s'il y a un piéton derrière le camion.
"Le plus grand défi est la quantité de signal perdu lorsque plusieurs rayons se reflètent", a déclaré Matthew O'Toole, le premier auteur de la thèse de l'Université de Stanford. "Le fait que le problème soit encore plus compliqué est qu'une voiture en mouvement aura besoin de mesurer ce signal rapidement et à distance en plein soleil." Malgré cela, cette technologie peut avoir un avenir brillant (malheureux) au-delà de la voiture auto-conduite. Les robots qui circulent dans les hôpitaux et les couloirs d'hôtels peuvent très bien détecter les personnes qui se présentent au coin de la rue. Il peut même être utilisé dans des équipements médicaux tels que les endoscopes. Ou cherchez simplement le lapin dans le coin.